
[မော်ဒယ် - HH-C-5KN]
အထွေထွေဖော်ပြချက်
SERSO စာနယ်ဇင်းသည် ac servo motor မှမောင်းနှင်သောကိရိယာတစ်ခုဖြစ်ပြီး Rotary force ကိုမြင့်မားသောဘောလုံး screw ၏ရှေ့တွင်ရှိသောဖိအားအာရုံခံကိရိယာမှဖိအားပေးမှုကိုထိန်းချုပ်ခြင်းနှင့်စီမံခန့်ခွဲမှုများကိုထိန်းချုပ်သည်။
မည်သည့်အချိန်တွင်မဆိုဖိအား / ရပ်တန့်ခြင်း / drive အမြန်နှုန်း / ရပ်တန့်ချိန်ကိုထိန်းချုပ်နိုင်သည်။ ဖိအားတပ်ဆင်ရေးလုပ်ငန်းတွင်ဖိအားပေးမှုတွင်နက်ရှိုင်းသောလုပ်ငန်းစဉ်တစ်ခုလုံး၏လုပ်ငန်းစဉ်တစ်ခုလုံး၏တံခါးပိတ်ထိန်းချုပ်မှုကိုနားလည်သဘောပေါက်နိုင်သည်။ ဖော်ရွေသောလူသား - ကွန်ပျူတာ interface နှင့်ထိတွေ့မျက်နှာပြင်သည်အလိုလိုသိ။ လုပ်ကိုင်ရန်လွယ်ကူသည်။ ၎င်းကိုလုံခြုံစိတ်ချရသောအလင်းကုလားကာဖြင့်တပ်ဆင်ထားသည်။ installation area ရိယာအတွင်း install area ရိယာသို့လက်လှမ်းမီပါကလုံခြုံစိတ်ချရသောလည်ပတ်မှုကိုသေချာစေရန် Indenter သည် Situ တွင်ရပ်နားလိမ့်မည်။
အကယ်. အပိုဆောင်းအလုပ်လုပ်တဲ့ configurations တွေကိုတိုးချဲ့ပြီးအရွယ်အစားပြောင်းလဲခြင်းကိုထည့်သွင်းရန်သို့မဟုတ်အခြားအမှတ်တံဆိပ်အစိတ်အပိုင်းများကိုသတ်မှတ်ရန်လိုအပ်ပါကစျေးနှုန်းကိုသီးခြားစီတွက်ချက်လိမ့်မည်။ ထုတ်လုပ်မှုပြီးဆုံးသည်နှင့်ကုန်ပစ္စည်းများပြန်မသွားပါ။
 အဓိကနည်းပညာဆိုင်ရာ parameters တွေကို
အဓိကနည်းပညာဆိုင်ရာ parameters တွေကို
သတ်မှတ်ချက်များ - HH-C-5KN
| ဖိအားတိကျမှန်ကန်မှုအတန်းအစား | အဆင့် 1 |
| အများဆုံးဖိအား | ကေျာက်် |
| ဖိအားအကွာအဝေး | 50n-5nown |
| နမူနာအရေအတွက် | တစ်စက္ကန့်လျှင် 1000 ကြိမ် |
| အများဆုံးလေဖြတ် | 150mm (စိတ်ကြိုက်) |
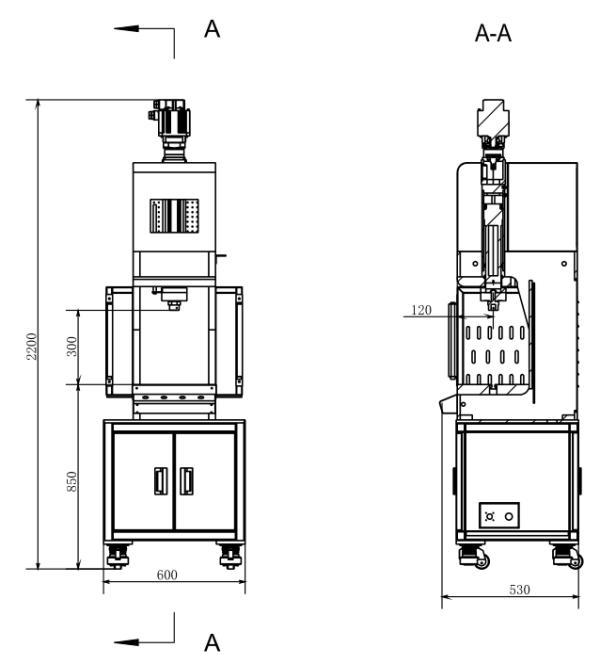
| ပိတ်ထားသောအမြင့် | 300mm |
| လည်ချောင်းနက်ရှိုင်း | 120mm |
| အိုးအိမ်မဲ့ resolution | 0.001mm |
| positioning တိကျမှန်ကန်မှုကို | ± 0.01mm |
| စာနယ်ဇင်းအမြန်နှုန်း | 0.01-35mm / s |
| အဘယ်သူမျှမ - ဝန်မြန်နှုန်း | 125mm / s |
| နိမ့်ဆုံးအမြန်နှုန်းကိုသတ်မှတ်နိုင်ပါတယ် | 0.01mm / s |
| ကိုင်ထားအချိန် | 0.1-150s |
| အချိန်အနည်းဆုံးဖိအား သတ်မှတ်နိုင်ပါသည် | 0.1s |
| ပစ္စည်းပါဝါ | 750w |
| ထောက်ပံ့ရေးဗို့အား | 220V |
| ခြုံငုံရှုထောင့် | 530 × 600 × 2200mm |
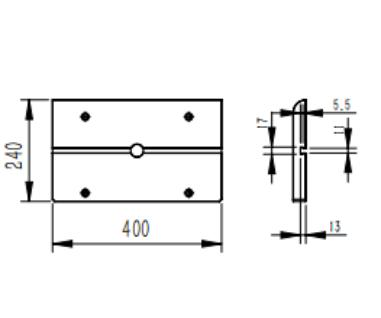
| အလုပ်လုပ်စားပွဲပေါ်မှာအရွယ်အစား | 400 မီလီမီတာ (ဘယ်ဘက်နှင့်ညာ), 240 မီလီမီတာ (ရှေ့နှင့်နောက်ဘက်) |
| အလေးချိန်အကြောင်းပါ | 350 ကီလိုဂရမ် |
| Indenter ၏အရွယ်အစားနှင့်အတွင်းပိုင်းအချင်း | φ 20mm, 25 မီလီမီတာနက်သော |
ပုံဆွဲခြင်းနှင့်ရှုထောင့်
Worktable အပေါ် t-shaped groove ၏အရွယ်အစား
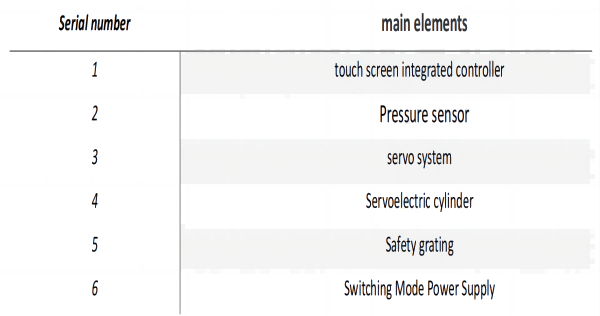
 အဓိကစနစ် configuration ကို
အဓိကစနစ် configuration ကို
 System Software ၏အဓိကမျက်နှာပြင်
System Software ၏အဓိကမျက်နှာပြင်
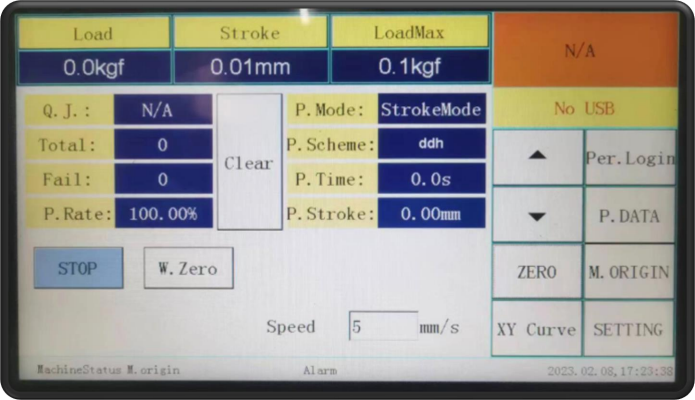
ပင်မ interface တွင် interface jump ခလုတ်, ဒေတာ display နှင့် manual opertion functions များပါဝင်သည်။ စီမံခန့်ခွဲမှု - ခုန်ခြင်း, ပိတ်ခြင်းနှင့် login metoding Method Selecting အပါအ 0 င်။ ချိန်ညှိချက်များ - ခုန်မျက်နှာပြင်နှင့် system settings အပါအ 0 င်။
သုည: ဝန်အရိပ်အမြွက်အချက်အလက်များကိုရှင်းလင်းပါ။
View: ဘာသာစကားချိန်ညှိခြင်းနှင့်ဂရပ်ဖစ် interface ရွေးချယ်ခြင်း။
အကူအညီ - ဗားရှင်းသတင်းအချက်အလက်, ပြုပြင်ထိန်းသိမ်းမှုသံသရာ setting ကို။
စမ်းသပ်အစီအစဉ် - စာနယ်ဇင်း mounting နည်းလမ်းကိုတည်းဖြတ်ပါ။
တစ်သုတ်ကိုပြန်လည် - လက်ရှိစာနယ်ဇင်း Mounting Data ကိုရှင်းလင်းပါ။
ပို့ကုန်အချက်အလက် - လက်ရှိစာနယ်ဇင်း Mounting Data ၏မူလအချက်အလက်များကိုတင်ပို့ပါ။
Online - ဘုတ်အဖွဲ့သည်အစီအစဉ်နှင့်ဆက်သွယ်မှုကိုတည်ဆောက်သည်။
အင်အားစု - အချိန်နှင့်တပြေးညီအင်အားစောင့်ကြည့်လေ့လာခြင်း။
အိုးအိမ်မဲ့ - Real-time press ၏ရပ်တန့်အနေအထား။
အများဆုံးအင်အားစု - နှိပ်ခြင်းလုပ်ငန်းစဉ်တွင်ရရှိသောအမြင့်ဆုံးအင်အားစု။
လက်စွဲစာအုပ်ထိန်းချုပ်မှု - အလိုအလျောက်အဆက်မပြတ်ဆင်းခြင်းနှင့်တက်ကြွခြင်း, တက်ကြွခြင်းနှင့်ဆင်းလာခြင်း, စမ်းသပ်မှု
ကန ဦး ဖိအား။
ပစ္စည်းကိရိယာများ
1 ။ မြင့်မားသောပစ္စည်းကိရိယာများတိကျမှန်ကန်မှု - ထပ်တလဲလဲအနေအထားတိကျမှန်ကန်မှု± 0.01 မီလီမီတာ, ဖိအားတိကျမှု 0.5% FS
2 ။ ဆော့ (ဖ်) ဝဲသည်မိမိကိုယ်ကိုဖွံ့ဖြိုးပြီးထိန်းသိမ်းရန်လွယ်ကူသည်။
3 ။ အမျိုးမျိုးသောနှိပ်ခြင်း modes: optional ဖိအားထိန်းချုပ်မှုနှင့်ရာထူးထိန်းချုပ်မှု။
4 ။ System သည် System Touch Screen Integrated Controller ကို အသုံးပြု. Sefense Program 10 ခုကိုတည်းဖြတ်နိုင်သည့် Programe Curve ကိုအချိန်နှင့်တပြေးညီဖော်ပြနိုင်ပြီး Pressive Pressure Curres 50 ကိုအွန်လိုင်းတွင်ဖော်ပြထားသည်။ ဒေတာ 50 ကျော်ကိုသိုလှောင်ထားပြီးနောက်ဒေတာအဟောင်းကိုအလိုအလျောက် overwrite လုပ်လိမ့်မည် (မှတ်ချက် - ပါဝါပျက်ကွက်ပြီးနောက်ဒေတာများကိုအလိုအလျောက်ရှင်းလင်းလိမ့်မည်) ။ သမိုင်းဆိုင်ရာအချက်အလက်များကိုသိမ်းဆည်းရန်ကိရိယာများသည်ပြင်ပ USB flash disk (8G fa32 format) ကိုချဲ့ထွင်နိုင်သည်။ ဒေတာအမျိုးအစားသည် xx.xlsx ဖြစ်သည်
5 ။ ဆော့ဖ်ဝဲတွင်ပါ 0 င်သည့်စာအိတ်လုပ်ဆောင်ချက်တစ်ခုရှိသည်။ Real-time data များသည်အကွာအဝေးအတွင်းတွင်မရှိပါကပစ္စည်းကိရိယာများသည်အလိုအလျောက်သတိပေးလိမ့်မည်။
6 ။ ပစ္စည်းကိရိယာများသည်အော်ပရေတာများ၏လုံခြုံမှုကိုသေချာစေရန်ကိရိယာများကိုလုံခြုံအောင်တပ်ဆင်ထားသည်။
7 ။
8 ။ အွန်လိုင်းစည်းဝေးပွဲအရည်အသွေးစီမံခန့်ခွဲမှုနည်းပညာသည်ချွတ်ယွင်းသောထုတ်ကုန်များကိုအချိန်နှင့်တပြေးညီရှာဖွေတွေ့ရှိနိုင်သည်။
9 ။ သီးခြားထုတ်ကုန်လိုအပ်ချက်များအရအကောင်းဆုံးအရေးတကြီးဖြစ်စဉ်ကိုသတ်မှတ်ပါ။
10 ။ တိကျတဲ့, ပြည့်စုံသောစစ်ဆင်ရေးလုပ်ငန်းစဉ်မှတ်တမ်းတင်ခြင်းနှင့်ခွဲခြမ်းစိတ်ဖြာခြင်းလုပ်ငန်းဆောင်တာ။
11 ။ ဒါဟာရည်ရွယ်ချက်ပေါင်းစုံ, ပြောင်းလွယ်ပြင်လွယ်သောဝါယာကြိုးနှင့်ဝေးလံခေါင်သီပစ္စည်းကိရိယာစီမံခန့်ခွဲမှုများကိုနားလည်သဘောပေါက်နိုင်သည်။
12 ။ Multiple Multiple Multiple Multiple Multiple Multiple Multiple, Excel, Word နှင့် Data ကို SPC နှင့်အခြားဒေတာခွဲခြမ်းစိတ်ဖြာစနစ်များသို့အလွယ်တကူတင်သွင်းနိုင်သည်။
13 ။ Self-Diachosise နှင့် Energy Defning - ပစ္စည်းကိရိယာများပျက်ကွက်မှုဖြစ်စဉ်တွင် servo citto-first-function သည်အမှားသတင်းအချက်အလက်များနှင့်ဖြေရှင်းနည်းများကိုပြသခြင်းနှင့်ဖြေရှင်းနည်းများကိုအလျင်အမြန်ဖြေရှင်းနိုင်သည်။
14. Multi-functional i / o ဆက်သွယ်ရေး interface - ဤ interface မှတဆင့်ပြင်ပထုတ်ကုန်များနှင့်ဆက်သွယ်ခြင်းကိုအကောင်အထည်ဖော်နိုင်ပြီးအပြည့်အဝအလိုအလျောက်ပေါင်းစည်းမှုအတွက်အဆင်ပြေသည်။
15 ။ ဆော့ (ဖ်) ဝဲသည်အုပ်ချုပ်ရေးမှူး, အော်ပရေတာနှင့်အခြားခွင့်ပြုချက်ကဲ့သို့သောခွင့်ပြုချက် setting လုပ်ဆောင်ချက်များကိုသတ်မှတ်သည်။
လျှောက်လွှာများ
1 ။ တိကျသောမော်တော်ကားအင်ဂျင်, ဂီယာရိုး, စတီယာရင်ကိုဂီယာနှင့်အခြားအစိတ်အပိုင်းများကိုတိကျစွာနှိပ်ခြင်း
2 ။ တိကျစွာအီလက်ထရောနစ်ထုတ်ကုန်များ၏ရှေ့ပြေးစာနယ်ဇင်း
3 ။ တိကျစွာပုံရိပ်နည်းပညာ၏အဓိကအစိတ်အပိုင်းများကိုသင့်လျော်သောစာနယ်ဇင်း
4 ။ မော်တာ bearing ၏တိကျစွာနှိပ်သည့်စာနယ်ဇင်းအသုံးပြုခြင်း
5 ။ ထိုကဲ့သို့သောနွေ ဦး စွမ်းဆောင်ရည်စမ်းသပ်အဖြစ်တိကျစွာဖိအားရှာဖွေတွေ့ရှိမှု
6 ။ အလိုအလျောက်တပ်ဆင်လိုင်းလျှောက်လွှာ
7 ။ Aerospace အဓိကအစိတ်အပိုင်းများကိုစာနယ်ဇင်းများကိုနှိပ်ပါ
8 ။ ဆေးဘက်ဆိုင်ရာနှင့်လျှပ်စစ်ကိရိယာများကိုစုဝေးခြင်းနှင့်စုဝေးခြင်း
9 ။ တိကျစွာဖိအားပေးမှုများလိုအပ်သည့်အခြားအချိန်များ
Post Time: ဖေဖော်ဝါရီ - 22-2023