
အပေြာင်းservo စာနယ်ဇင်းac servo motor မှမောင်းနှင်သောကိရိယာသည် Rotary for ကိုမြင့်မားသောဘောလုံး screw ၏ရှေ့တွင်ရှိသောဖိအားပေးမှုအာရုံခံကိရိယာမှဖိအားပေးမှုနှင့်စီမံခန့်ခွဲမှုများကိုထိန်းချုပ်ခြင်းနှင့်စီမံခန့်ခွဲမှုများကိုထိန်းချုပ်သည်။
မည်သည့်အချိန်တွင်မဆိုဖိအား / ရပ်တန့်ခြင်း / drive အမြန်နှုန်း / ရပ်တန့်ချိန်ကိုထိန်းချုပ်နိုင်သည်။ ဖိအားတပ်ဆင်ရေးလုပ်ငန်းတွင်ဖိအားပေးမှုတွင်နက်ရှိုင်းသောလုပ်ငန်းစဉ်တစ်ခုလုံး၏လုပ်ငန်းစဉ်တစ်ခုလုံး၏တံခါးပိတ်ထိန်းချုပ်မှုကိုနားလည်သဘောပေါက်နိုင်သည်။ ဖော်ရွေသောလူသား - ကွန်ပျူတာ interface နှင့်ထိတွေ့မျက်နှာပြင်သည်အလိုလိုသိ။ လုပ်ကိုင်ရန်လွယ်ကူသည်။ ၎င်းကိုလုံခြုံစိတ်ချရသောအလင်းကုလားကာဖြင့်တပ်ဆင်ထားသည်။ installation area ရိယာအတွင်း install area ရိယာသို့လက်လှမ်းမီပါကလုံခြုံစိတ်ချရသောလည်ပတ်မှုကိုသေချာစေရန် Indenter သည် Situ တွင်ရပ်နားလိမ့်မည်။
အကယ်. အပိုဆောင်းအလုပ်လုပ်တဲ့ configurations တွေကိုတိုးချဲ့ပြီးအရွယ်အစားပြောင်းလဲခြင်းကိုထည့်သွင်းရန်သို့မဟုတ်အခြားအမှတ်တံဆိပ်အစိတ်အပိုင်းများကိုသတ်မှတ်ရန်လိုအပ်ပါကစျေးနှုန်းကိုသီးခြားစီတွက်ချက်လိမ့်မည်။ ထုတ်လုပ်မှုပြီးဆုံးသည်နှင့်ကုန်ပစ္စည်းများပြန်မသွားပါ။
အဓိက စက်မှုလက်မှု parameters
အသေးစိတ်အချက်အလက်: HH-S-200n
| နေရာချထား Accူအစွမ်း | အဆင့်အတန်း 1 |
| အများဆုံး ဖိနှိပ်ခြင်း | 2ကေြလ် |
| သိမ်းသက်ပြင်းစေ အကွာအဝေး | 800N-1ကေြလ် |
| နေရာချထား Accူအစွမ်း | ± 0.02mm |
| ဖိနှိပ်ခြင်း စစ်ဆေးioN ဟုတ်မှန်ရေး | 0.5% FS |
| မတရားနေှာ REအဖေြ အချက်များ ရယူခြင်း ခဏခဏဖြစ်ခြင်း | 0.001m1000 / s |
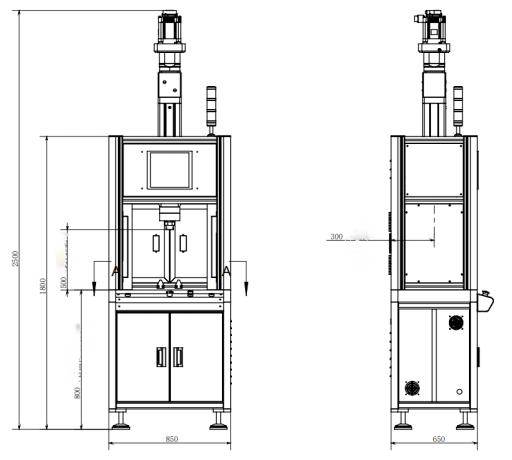
| မက်စငွေimum လေဖြတ် | 150mm |
| ပိတ်ထားသော Hရှစ် | 500mm |
| လည်ခေျာင်း အနက် | 300 မီတာm |
| DIE အရွယ် | e 20mm, 25mm နက်သော |
| PRခဲှခြင်း အရှိန် | 0.01-35mm / s |
| အလွန်လျင်မြန်သော ကြှေးမှေး rathata | 0.01-125mm / s |
| အပေြာင်း အနည်းဆုံး အရှိန် နိုင် BE အစုံ TO | 0.01mm/s |
| ဖိနှိပ်ခြင်း စောင့်ခြင်း အချိန် | 0-99s |
| ပစ္စည်းကရိယာ စွမ်းအား | 20kw |
| ပစ္စည်းကရိယာ စွမ်းအား | 3 ~ AC380V 50HZ |
| အပေြာင်း အလေးချိန် IS အကေြာင်း | 650kg |
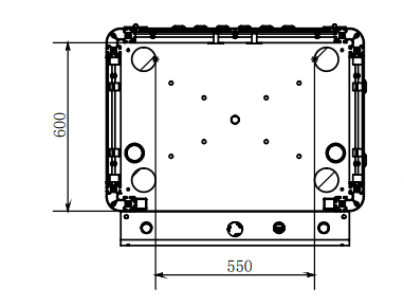
ကားပုံ & အတိုင်းအတာ
Worktable အပေါ် t-shaped groove ၏အရွယ်အစား
| နံပါတ်စဥ် | အဓိကဒြပ်စင်များ |
| 1 | ထိတွေ့မျက်နှာပြင်ပေါင်းစည်း Controller |
| 2 | ဖိအားအာရုံခံကိရိယာ |
| သုံး | servo system ကို |
| 4 | servoelectric ဆလင်ဒါ |
| 5 | ဘေးကင်းလုံခြုံရေးဆန်ခါ |
| 6 | switching mode power ထောက်ပံ့ရေး |
မေn ထိသိျက်နှာ of စံနစ် ဆော့ (ဆော့ဆစ်
1 ။ ဖိအားသိမ်းထားသည့်အချိန်၏အဓိကမျက်နှာပြင်တွင် interface jump ခလုတ်များ, ဒေတာမျက်နှာပြင်နှင့်လက်စွဲစစ်ဆင်ရေးလုပ်ဆောင်ချက်များပါဝင်သည်။
2 ။ စီမံခန့်ခွဲမှု: Jump Interface Scheme Backup, shutdown, shutdown, login mode selection ကိုထည့်သွင်းပါ။
3 ။ ချိန်ညှိချက်များ - ခုန် interface units နှင့် system settings များပါဝင်သည်။
4 ။ သုည: ဗလာစို့ဝန်ညွှန်ပြချက်အချက်အလက်။
5 ။ View: ဘာသာစကားချိန်ညှိချက်များနှင့် GUI ရွေးချယ်ခြင်း။
6 ။ အကူအညီ - ဗားရှင်းသတင်းအချက်အလက်, ပြုပြင်ထိန်းသိမ်းမှုသံသရာဆက်တင်များ။
7 ။ Plan ကိုနှိပ်ပါ။ ဖိအားပေးမှုနည်းလမ်းကိုတည်းဖြတ်ပါ။
8 ။ သုတ်ခြင်း - လက်ရှိဖိအားဒေတာကိုရှင်းလင်းပါ။
9 ။ အင်အားစု - အချိန်နှင့်တပြေးညီအင်အားစောင့်ကြည့်လေ့လာခြင်း။
10 ။ ရွှေ့ပြောင်းခံရခြင်း - Real-time Press Stop အနေအထား။
11 ။ အများဆုံးအင်အားစု - လက်ရှိနှိပ်ခြင်းလုပ်ငန်းစဉ်အတွင်းထုတ်လုပ်သောအမြင့်ဆုံးအင်အားစု။
12 ။ လက်စွဲစာအုပ်ထိန်းချုပ်မှု: အလိုအလျောက်အဆက်မပြတ်ထ, လက်မထ။ လဲ။ ကန ဦး ဖိအားကိုစမ်းသပ်ပါ။
ပစ္စည်းကရိယာ feသေှးကေျာက်
1 ။ မြင့်မားသောပစ္စည်းကိရိယာများတိကျမှန်ကန်မှု - ထပ်တလဲလဲနေရာချထားမှုတိကျမှန်ကန်မှု± 0.02 မီလီမီတာ, ဖိအားတိကျမှု 0.5% FS
2 ။ ဆော့ (ဖ်) ဝဲသည်မိမိကိုယ်ကိုဖွံ့ဖြိုးပြီးထိန်းသိမ်းရန်လွယ်ကူသည်။
3 ။ အမျိုးမျိုးသောနှိပ်ခြင်း modes: optional ဖိအားထိန်းချုပ်မှုနှင့်ရာထူးထိန်းချုပ်မှု။
4 ။ System သည် System Touch Screen Integrated Controller ကို အသုံးပြု. Sefense Program 10 ခုကိုတည်းဖြတ်နိုင်သည့် Programe Curve ကိုအချိန်နှင့်တပြေးညီဖော်ပြနိုင်ပြီး Pressive Pressure Curres 50 ကိုအွန်လိုင်းတွင်ဖော်ပြထားသည်။ ဒေတာ 50 ကျော်ကိုသိုလှောင်ထားပြီးနောက်ဒေတာအဟောင်းကိုအလိုအလျောက် overwrite လုပ်လိမ့်မည် (မှတ်ချက် - ပါဝါပျက်ကွက်ပြီးနောက်ဒေတာများကိုအလိုအလျောက်ရှင်းလင်းလိမ့်မည်) ။ သမိုင်းဆိုင်ရာအချက်အလက်များကိုသိမ်းဆည်းရန်ကိရိယာများသည်ပြင်ပ USB flash disk (8G fa32 format) ကိုချဲ့ထွင်နိုင်သည်။ ဒေတာအမျိုးအစားသည် xx.xlsx ဖြစ်သည်
5 ။ ဆော့ဖ်ဝဲတွင်ပါ 0 င်သည့်စာအိတ်လုပ်ဆောင်ချက်တစ်ခုရှိသည်။ Real-time data များသည်အကွာအဝေးအတွင်းတွင်မရှိပါကပစ္စည်းကိရိယာများသည်အလိုအလျောက်သတိပေးလိမ့်မည်။
6 ။ ပစ္စည်းကိရိယာများသည်အော်ပရေတာများ၏လုံခြုံမှုကိုသေချာစေရန်ကိရိယာများကိုလုံခြုံအောင်တပ်ဆင်ထားသည်။
7 ။
8 ။ အွန်လိုင်းစည်းဝေးပွဲအရည်အသွေးစီမံခန့်ခွဲမှုနည်းပညာသည်ချွတ်ယွင်းသောထုတ်ကုန်များကိုအချိန်နှင့်တပြေးညီရှာဖွေတွေ့ရှိနိုင်သည်။
9 ။ သီးခြားထုတ်ကုန်လိုအပ်ချက်များအရအကောင်းဆုံးအရေးတကြီးဖြစ်စဉ်ကိုသတ်မှတ်ပါ။
10 ။ တိကျတဲ့, ပြည့်စုံသောစစ်ဆင်ရေးလုပ်ငန်းစဉ်မှတ်တမ်းတင်ခြင်းနှင့်ခွဲခြမ်းစိတ်ဖြာခြင်းလုပ်ငန်းဆောင်တာ။
11 ။ Self-Diachosise နှင့် Energy Defning - ပစ္စည်းကိရိယာပျက်ကွက်မှုဖြစ်စဉ်တွင် servo curme-first function သည်ပြ the နာကိုလျင်မြန်စွာဖြေရှင်းရန်အဆင်ပြေသောဖြေရှင်းနည်းများနှင့်ဖြေရှင်းနည်းများကိုပြသသည်။
12 ။ ဆော့ (ဖ်) ဝဲသည်အုပ်ချုပ်ရေးမှူး, အော်ပရေတာနှင့်အခြားခွင့်ပြုချက်ကဲ့သို့သောခွင့်ပြုချက်ချိန်ညှိချက်များကိုသတ်မှတ်ထားသည်
လျှောက်လွှာများ
1 ။ တိကျသောမော်တော်ကားအင်ဂျင်, ဂီယာရိုး, စတီယာရင်ကိုဂီယာနှင့်အခြားအစိတ်အပိုင်းများကိုတိကျစွာနှိပ်ခြင်း
2 ။ တိကျစွာအီလက်ထရောနစ်ထုတ်ကုန်များ၏ရှေ့ပြေးစာနယ်ဇင်း
3 ။ တိကျစွာပုံရိပ်နည်းပညာ၏အဓိကအစိတ်အပိုင်းများကိုသင့်လျော်သောစာနယ်ဇင်း
4 ။ မော်တာ bearing ၏တိကျစွာနှိပ်သည့်စာနယ်ဇင်းအသုံးပြုခြင်း
5 ။ ထိုကဲ့သို့သောနွေ ဦး စွမ်းဆောင်ရည်စမ်းသပ်အဖြစ်တိကျစွာဖိအားရှာဖွေတွေ့ရှိမှု
6 ။ အလိုအလျောက်တပ်ဆင်လိုင်းလျှောက်လွှာ
7 ။ Aerospace အဓိကအစိတ်အပိုင်းများကိုစာနယ်ဇင်းများကိုနှိပ်ပါ
8 ။ ဆေးဘက်ဆိုင်ရာနှင့်လျှပ်စစ်ကိရိယာများကိုစုဝေးခြင်းနှင့်စုဝေးခြင်း
9 ။ တိကျစွာဖိအားပေးမှုများလိုအပ်သည့်အခြားအချိန်များ
Post Time: Mar-28-2023